🤖 Vue d'Ensemble & Mécanique
Introduction
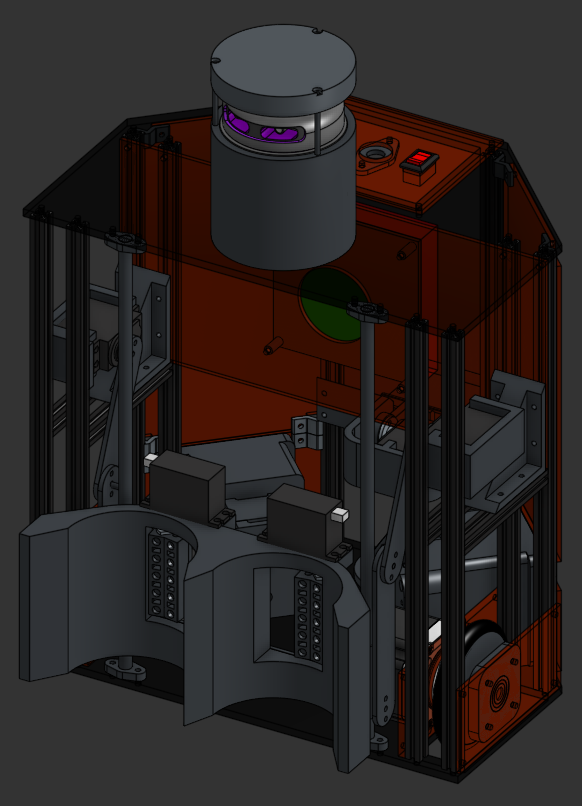
Cette section détaille l'architecture physique, la conception mécanique et les spécifications techniques globales du robot principal. Elle sert de carte d'identité pour comprendre sa structure et ses capacités.
Spécifications Techniques
| Caractéristique | Valeur |
|---|---|
| Dimensions (L x l x h) | 250 x 300 x 430 mm |
| Poids | 5 Kg |
| Vitesse maximale | 2 m/s |
| Autonomie | 2 Heures |
| Matériau du châssis | Bois, plastique & métal |
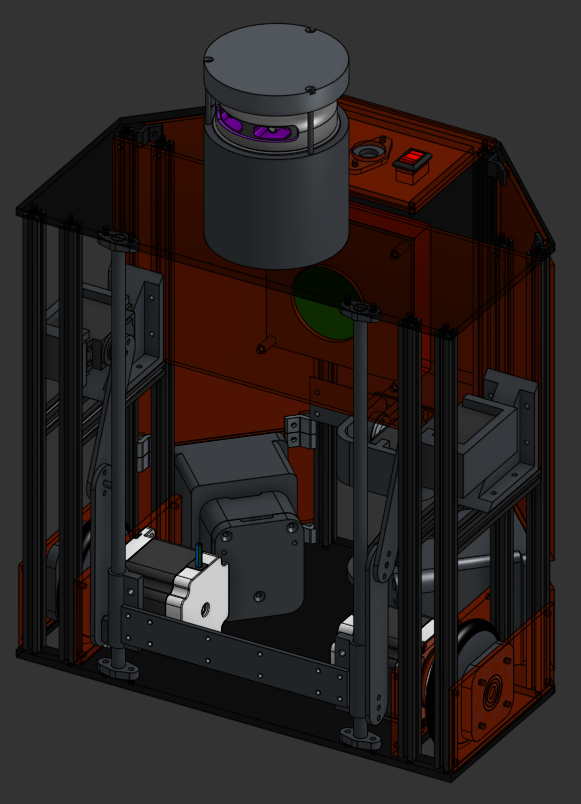
Architecture Mécanique
Châssis et Structure
Le squelette du robot est formé de profilés MakerBeam verticaux, fixé aux planches fabriquer avec la decoupeuse laser. Une plaque de support est intégrée pour accueillir la carte électronique.
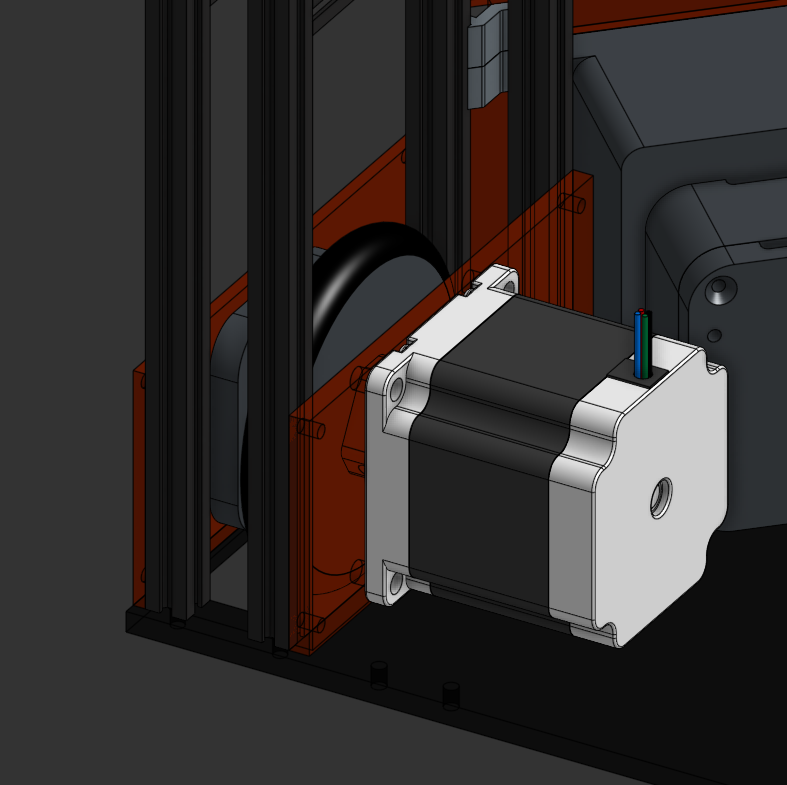
Système de Propulsion
Le mouvement est assuré par deux moteurs NEMA 23. Ils sont fixés solidement sur les profilés MakerBeam à l'aide de supports moteur dédiés et alimenter en 24V.
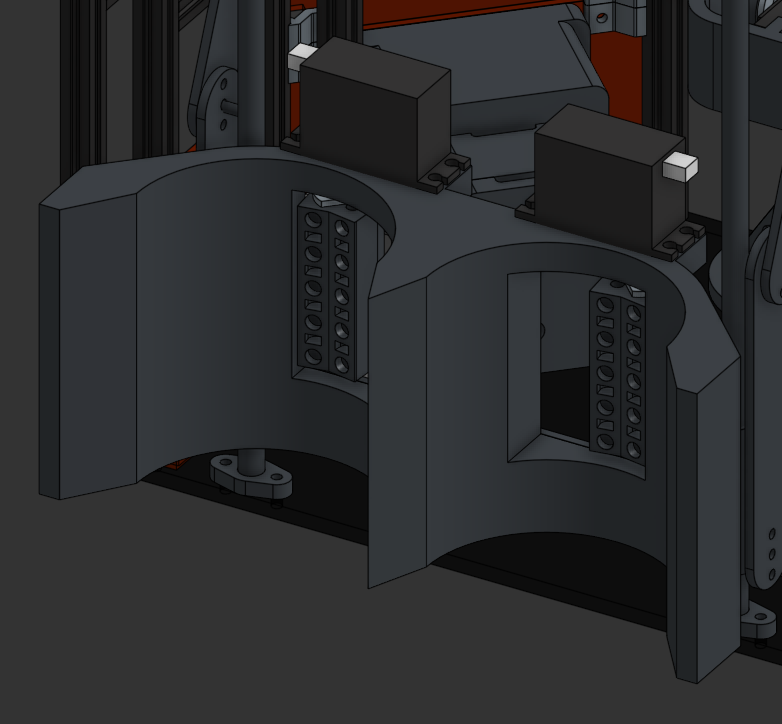
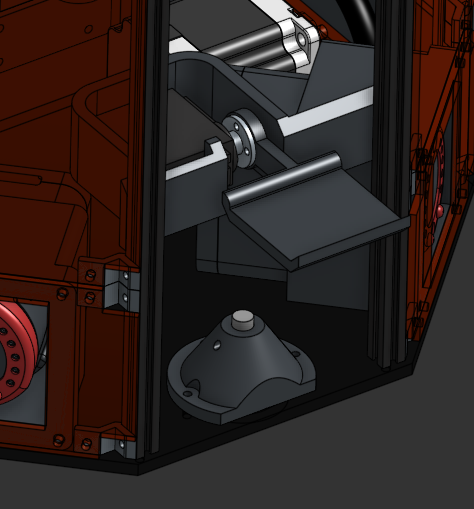
Actionneurs principal
Un actionneur pour les canettes et les planche est positionné à l'avant' du robot. Son mouvement est guidé par deux tiges verticales pour garantir un déploiement fiable et précis.
Actionneurs bannière
Un actionneur pour la bannière est positionné à l'arrière du robot. Son mouvement est guidé par un servomoteur.
Fichiers de Conception (CAO)
Le fichier de conception 3D pour le châssis et les pièces du Robot est disponible au format STEP. Vous pouvez les télécharger ici : CAO_robot.zip.