🧠 Vue d'Ensemble & Mécanique (PAMI)
Introduction
Cette section est dédiée aux robots secondaires, appelés "PAMI".
Spécifications Techniques (Exemples)
| Caractéristique | Valeur |
|---|---|
| Dimensions (L x l x h) | 150 x 120 x 100 mm |
| Poids | ~ 0.8 Kg |
| Vitesse maximale | 0.5 m/s |
| Autonomie | ~ 1H30 |
| Matériau du châssis | PLA (impression 3D) |
Architecture Mécanique
Châssis et Structure
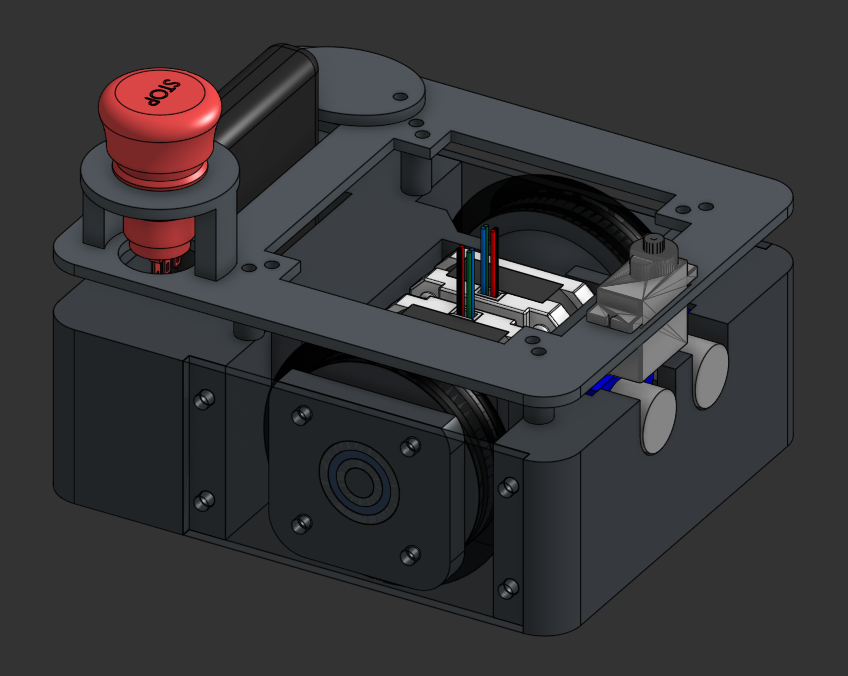
Le châssis du PAMI est une pièce monobloc compacte, entièrement réalisée en impression 3D. Cette conception intègre directement les supports pour les moteurs, la batterie et la carte électronique, optimisant ainsi l'espace et le poids.
Système de Propulsion
La propulsion est assurée par deux petits Nema 17, qui offrent un bon compromis entre vitesse et couple pour un robot de cette taille. Les roues sont également imprimées en 3D avec une bande de roulement en caoutchouc (TPU) pour une meilleure adhérence.

Actionneur
Chaque PAMI est équipé d'un petit actionneur unique.
Fichiers de Conception (CAO)
Le fichier de conception 3D pour le châssis et les pièces du PAMI est disponible au format STEP. Vous pouvez les télécharger ici : CAO_pamis.zip.