⚡ Architecture Électronique
Conception et Réalisation
En dehors de la carte électronique, l’électronique a été entièrement conçue et réalisée par notre équipe.
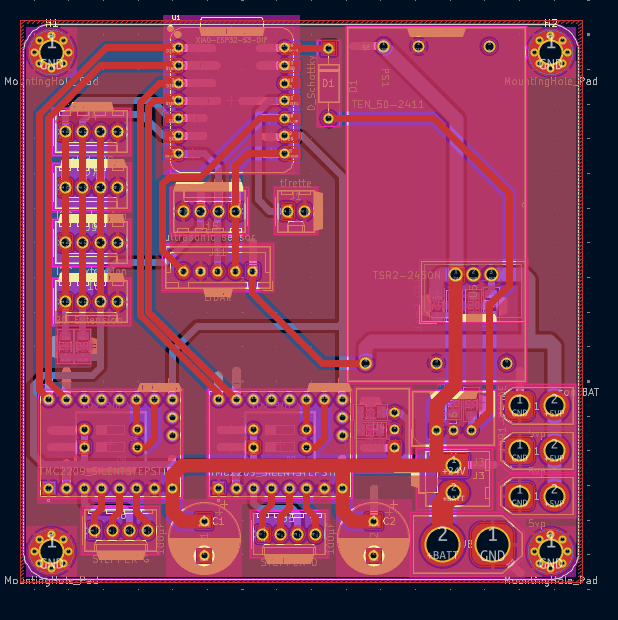
La Carte Électronique Principale
La carte électronique principale centralise les fonctions critiques du robot et intègre :
- Les drivers de moteurs pas à pas pour le contrôle des NEMA 23 via des signaux STEP/DIR.
- Un XIAO ESP32-S3, utilisé comme microcontrôleur principal pour la gestion des capteurs, moteurs et actionneurs.
- Un connecteur dédié pour le RPLIDAR A1M8, relié à la carte via une interface UART.
Alimentation
L’alimentation est assurée par 2 batteries Parkside 12V, montées en série pour fournir une tension suffisante. Les supports de batteries ont été conçus et fabriqués par l’équipe afin de garantir une fixation solide et accessible.
Système Centralisé et Sécurité
Tous les composants sont connectés directement à la carte via un système centralisé pour simplifier le câblage et la maintenance :
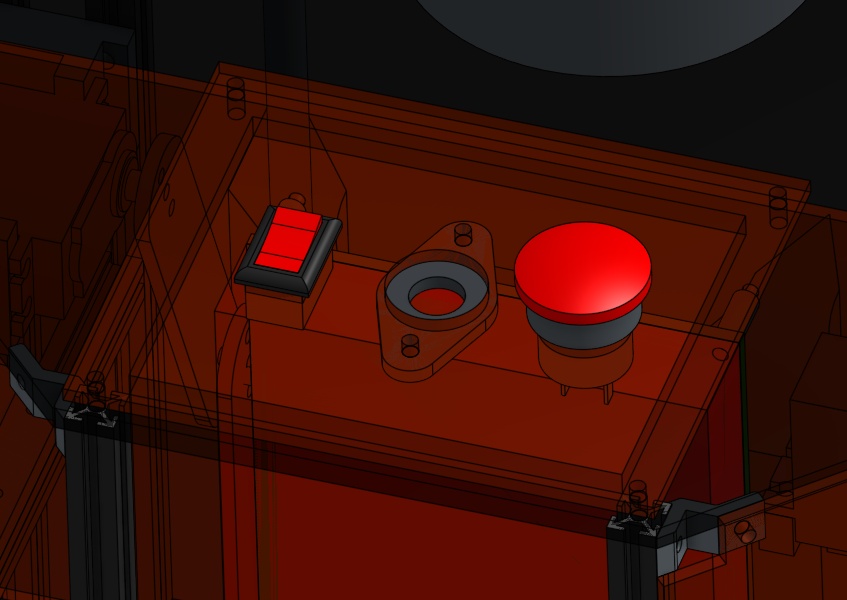
- Un interrupteur général (tirette de sécurité) permet la mise sous tension manuelle.
- Un BAU (Bouton d'Arrêt d'Urgence) est présent pour couper immédiatement l'alimentation.
- Les servomoteurs et l’actionneur magnétique sont pilotés via un adaptateur I2C connecté à la carte.
- Le Lidar, les moteurs et tous les modules sont regroupés sur cette seule interface.

Philosophie de Conception
Cette conception centralisée et compacte visait à rendre le robot modulaire, fiable et simple à dépanner, bien que la partie logicielle n’ait pas été finalisée à temps.